江苏鹤奇工业自动化设备有限公司 自动化立体仓库|堆垛机|穿梭车|AGV小车生产厂家
18014156227


2025-07-15 02:03:33
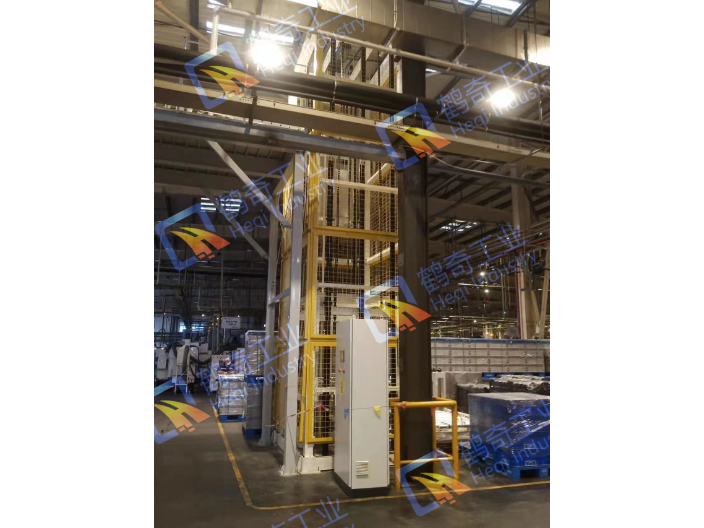
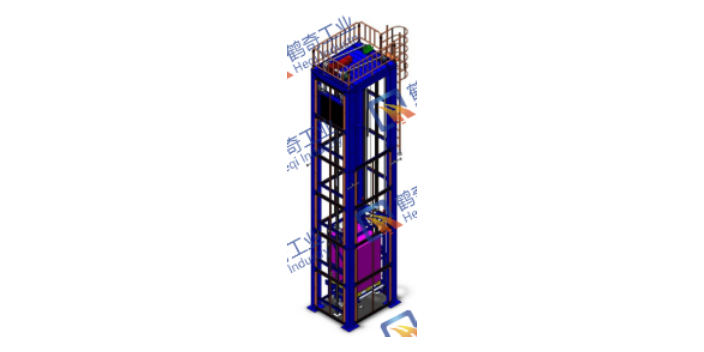
堆垛机从结构形式上区别,目前立体仓库中堆垛机有双立柱结构和单立柱结构。双立柱结构的堆垛机机架由两根立柱和上横梁、下横梁组成一个长方形框架。立柱形式有方管和圆管。方管兼作起升导轨,圆管附加起升导轨。双立柱堆垛机的优点就是强度和刚性都比较好,并且运行平稳。一般对于起重高度较高、起重量较大和水平运行速度高的立体仓库堆垛机多采用双立柱结构。双立柱堆垛机的起升机构,普遍采用链条传动,由电机减速机驱动链轮转动,通过链条引载货台沿立柱或起升机导轨作升降运动。由于链条牵引载货台或配重装置,受空间尺寸限制,传动和布置较复杂,但定位较准确。堆垛机的组成 :金属结构;行走机构;起升机构;载货台;存取机构;驾驶室;安全保护装置;电气设备。山西自动化堆垛机销售厂

堆垛机的电气控制模式手动控制:堆垛机处于手动模式,不接受任何自动任务,只能手动控制堆垛机的手动控制。操作人员通过操作面板直接操作机构,包括三个动作:水平操作、提升装载平台和叉的伸缩;单机自动:堆垛机处于自动模式,只接受本地任务,不受WMS控制。操作员按下机载电控柜上操作面板上的按钮,输入进仓(出仓)指令,堆垛机自动完成进仓(出仓)操作,返回仓端等待订单;在线自动控制:在自动模式下,堆垛机只接受仓库管理系统(WMS系统)的任务。在计算机控制室,操作员通过操作终端输入进/出任务或进/出指令,计算机和堆垛机通过红外通讯将进/出指令连接到堆垛机,堆垛机自动完成进/出操作。操作人员通过监控电脑屏幕的动态画面,可以实时了解堆垛机的位置和运行状态。福建自动化堆垛机厂家供应堆垛机,是立体仓库中重要的起重运输设备,是立体仓库特征的标志。

堆垛机(起重机)的操作A.接通电源,相序继电器自动判断电源的相序,使电机正转(即与油泵同向);B.启动电机,等待油泵空转3分钟后开始工作;C.操作非车载控制阀:首先检查固定装置是否连接好,然后拔出腿部固定销,然后击打腿部。如果发现机载回转支承的倾斜度超过极限值,则分别调平每条支腿;D.操作登车控制阀:只有调整好支腿后才能进行登车控制。无载荷时,可任意进行两次组合动作;装载时,只允许旋转和慢速提升相结合,但操作员必须小心操作,操作员可以通过操纵杆控制各机构的工作速度;E.操纵驱动控制阀:将上、下转换阀的阀杆推向下车方向,然后操纵前进和后退阀移动起重机,操作完毕后将转换阀推到上车位置,否则上车时将没有液压动力(起重机只有在所有垂直支腿油缸缩回后才能行驶)。F.每周检查漏电断路器是否工作可靠。即接通电源后,按下漏电断路器上的测试按钮。如果能跳闸,就能证明漏电断路器工作正常。4.起重机的安全运行需要拆除车轴传动轴和后轮轴之间的连接处的螺栓。传动轴固定后,即可牵引行驶。
巷道堆垛机:巷道堆垛机沿货架仓库巷道内的轨道运行,可以使作业高度提高;采用货叉伸缩机构,使货叉可以伸缩,这样就可以使巷道宽度变窄,提高仓库的利用率;巷道堆垛机一般采用半自动和自动控制装置,运行速度和生产效率都较高;其只能在货架巷道内作业,因此要配备出入库装置;机架除应满足一般起重机的强度和刚度要求外,还有较高的制造与安装精度要求;采用特殊型式的取物装置,常用多节伸缩货叉或货板;各机构电气传动调速要求高,且要求起制动平衡,停车准确,采用安全保护装置,措施齐全。巷道堆垛机的起升机构可以由电动机、制动器、减速器或链轮及柔性件组成,常用的柔性件有钢丝绳和起重链等。

堆垛机(起重机)的安全操作要求:任何设备的技术和性能都不是100%完美的,产品在性能和性价比上付出了很大的努力。由于成本有限,设备在技术上仍不完善。为了确保用户操作的安全性、可靠性和应有的效率,特制定以下说明。使用和管理时请特别注意。(1)本机升降操作部分的技术性能优于运行系统。因此,适用于平坦小区域的流水作业。(2)起重机车轮下沉无法启动时,可将所有支腿踢起,待车轮下的坑垫好后,再将支腿收回。(3)行驶时,吊臂必须放在前面。否则,当路面不平整时,很容易造成转盘打滑,发生重大事故。(4)不要完全依靠吊臂超起限制器来防止其倾斜,注意正常运行时不要超过吊臂较大的变幅角度。单立柱堆垛机对于钢丝绳传动,传动和布置相对容易,但定位准确性稍差。常州仓库堆垛机销售公司
堆垛机控制系统硬件配置完成后,将变频器的输入与输出(I/O)配置文件与PLC 输入与输出映像区匹配。山西自动化堆垛机销售厂
堆垛机变频器,用SoMove软件连接变频器,将变频器的总线模块DHCP功能打开,打开西门子STEP7软件找到变频器总线模块的MAC地址,将写好的IP地址分配到变频器。地址分配成功后,在SoMove软件Profinet设置参数界面可以查看IP地址信息、监控参数有无错误。需要注意设备名称和IP地址在堆垛机控制系统内只有一个,Profinet设置参数界面,配置变频器参数利用SoMove软件在线访问变频器,根据电机铭牌参数快速完成基本参数配置,进行电机参数静态识别,优化完成后,首先点动测试,检查编码器确定反馈参数与设定速度在合理偏差内,配置编码器参数,将开环运行改为闭环控制。继续点动测试,保证在手动低速控制下堆垛机水平轴的运行没有抖动,运行过程平稳。山西自动化堆垛机销售厂