
蓝鲸智能机器人(深圳)有限公司 通用机器人无轨导航系统|机器人SLAM导航方案|ROS自动充电模块|无轨AGV/AMR
159****0092


2022-08-11 08:09:05
蓝鲸智能机器人深圳有限公司成立于2015年,简称蓝鲸智能,蓝鲸智能机器人深圳有限公司主要团队人员在机器人领域有多年研究开发经验。蓝鲸智能拥有视觉导航方面完整,河北定制机器人小车、可靠的解决方案,河北定制机器人小车。蓝鲸智能致力于提供超高性价比的机器人自主移动系统,应用在扫地机、服务机器人、安防机器人、工业AGV和无人叉车等产品上。蓝鲸智能已经为数十家机器人相关企业提供了稳定可靠的解决方案,河北定制机器人小车。蓝鲸智能将会推出功能丰富的智能移动产品以及解决方案,期待您的合作!单目视觉导航早已投入工业应用。河北定制机器人小车

蓝鲸机器人的上位机和机器人的交互原理如下。首先蓝鲸机器人公司的移动平台上会开启一个udp广播服务端。向局域网发送广播数据。广播数据包含蓝鲸机器人公司的移动平台的主机信息,如ip,mac,端口,id。客户端会等待广播数据。当Windows客户端收到广播数据之后向蓝鲸机器人公司的移动平台上的udp服务器发送数据,表明自己的存在。之后蓝鲸机器人公司的移动平台程序会根据收到的相关信息和Windows客户端建立连接。在局域网内同时有多个蓝鲸机器人公司的移动平台主机和多个客户端的时候。按照之前说明,每个蓝鲸机器人公司的移动平台主机都会广播出自己相关信息。客户端会根据收到的udp广播信息维护一份当前局域网蓝鲸机器人公司的移动平台主机的列表。当客户端点击连接按钮后会弹出一个下拉菜单选择需要连接的蓝鲸机器人公司的移动平台主机。在发现过程完成之后,客户端和服务器都有了对方的信息。Windows客户端会建立一个udp服务器,然后蓝鲸机器人公司的移动平台通过udp连接把状态信息发送至Windows客户端。Windows客户端显示对应的状态。关于地图载入部分、地图绘制、控制部分等原理,可以登录蓝鲸智能机器人(深圳)有限公司官方网站,找到论坛入口进行交流。四川配送机器人AGV蓝鲸机器人的VSLAM导航系统发布SDK。

本人是在蓝鲸智能机器人(深圳)有限公司任技术总监,和大家聊聊线程和协程的话题,在写程序的时候为了提高执行效率经常会用到线程.把任务分配到不同的线程里面同时执行,这样即使其中一个被阻塞了,程序还是可以运行,程序运行效率得到了很大的提高.线程是一个经常用到的概念这里就不多说了.但是随着大家使用的线程越来越多,线程的劣势就越来越明显了.**有名的就是c10k问题.c10k问题是在写服务器程序时遇到的.如何使一个服务器同时和10K个客户端保持网络连接?一般的做法是给每个连接开一个**的线程,但是这样就会有上万个线程.大量的资源被浪费在线程的管理上.线程已经无法再胜任这个任务了.在javascript中处理异步问题的方式给了我们很好的思路.javascript程序是单线程的,也就是某一时刻只能有一个程序在运行.但是javascript却可以很好的处理异步问题.
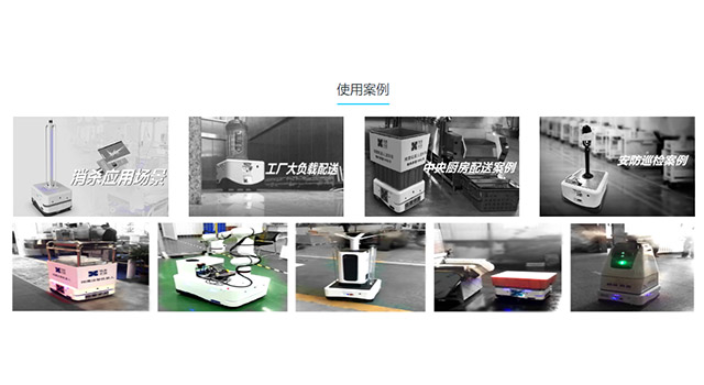
赤兔AGV是由蓝鲸机器人开发的基于ROS的智能移动AGV,赤兔采用自动驾驶技术,具有使用简单,稳定可靠,移动灵活的特点。赤兔实现了多场景应用拓展,加快了蓝鲸通用底盘在自主移动机器人市场的战略布局,实现货物自动投递、巡检巡逻、移动消杀、餐厅送餐等场景。赤兔的使用方式也非常简单。首先遥控赤兔机器人在工作环境中走一遍,让机器人记住周围环境。此时机器人会自动的创建一个周围环境的地图。通过客户端在机器人创建的地图中绘制用户想要机器人行走的路线。点击开始后机器人就可以自动开始移动了。使用ps4手柄控制机器人小车移动。
当前ROS是只支持Python2.7的。Python3的支持在ROS的计划中,详细的可以看这里。简单说来就是要到2020年ROS的N版本才能完全支持Python3。首先要了解为什么ROS不能支持Python3.对于纯的Python代码同时支持Python3和Python2.7是比较容易的,基本上ROS的代码也都是支持的。问题在于包含了C++或者C的那部分Python代码。Python2.7和Python3的cmodule代码相差很大。一次只能编译其中的一种版本。而且很多module没有做好Python3的支持。在Python3环境下也无法编译。这就是ROS无法支持Python3的原因。目前ROS的**包都是支持用Python3从源码编译的。但是官方并没有发布Python3的软件包。所以想要使用的话要自己编译。蓝鲸智能机器人论坛介绍两种使用Python3的方法,具体可以登陆蓝鲸智能官方论坛查看。如何简单规避冗余参数对曲面方程拟合的影响。广西移动机器人配送
蓝鲸的小强机器人提供手机遥控app安卓版。河北定制机器人小车
拉格朗日调度系统(TCS)是一款用于机器人多机协同工作的机器人调度系统,它能够同时管理多台机器人使得机器人在同一区域内高效的执行用户发布的任务而不相互干扰。通过调度系统界面我们可以方便的对任务进行管理控制。如发布任务、开始、暂停、和取消任务。系统还包含了任务优先级控制。高优先级的任务可以抢占低优先级的任务。同时还包含了自动充电和待机控制。当机器人电量不足时,系统会自动控制机器人返回充电桩充电,直至机器人电量满足工作要求。相比于其他调度系统,拉格朗日调度系统(TCS)具有使用方便,部署简单快捷,维护成本低的优势。河北定制机器人小车
蓝鲸智能机器人(深圳)有限公司致力于机械及行业设备,是一家生产型公司。公司业务分为通用机器人无轨导航系统,机器人SLAM导航方案,ROS自动充电模块,无轨AGV/AMR等,目前不断进行创新和服务改进,为客户提供良好的产品和服务。公司注重以质量为中心,以服务为理念,秉持诚信为本的理念,打造机械及行业设备良好品牌。蓝鲸智能机器人立足于全国市场,依托强大的研发实力,融合前沿的技术理念,及时响应客户的需求。


